
在仿生软件滚动机器人运动领域,研究人员取得了进展
近日,哈尔滨工业大学深圳校区前沿学院教授仲政、梁旭东团队在软件滚动机器人运动机理领域取得了新的进展。研究人员通过观察和力学建模果蝇幼虫滚动时的肌肉活性,揭示了动物可以通过内部肌肉依次轴向收缩和放松产生滚动扭矩的原理,并将这一原理应用到软机器人中,实现自主滚动,开辟了一条新的滚动机构设计之路。这一成果发表在《物理评论快报》上,被选为“编辑首选”。
轮子的发明被称为人类文明的里程碑,其核心是将平移转化为滚动扭矩。传统观点认为,滚动必须依靠外力或身体和环境的反冲力,如甲虫翻盘时的蹬地动作。然而,自然界中的一些动物表现出完全不同的智慧。它们通过改变身体的内部结构来实现自主滚动。例如,如果苍蝇幼虫在遇到危险时能将身体弯曲成C形,并继续滚动逃跑,这种“内力驱动”的机制还没有完全探索出来。针对这个问题,团队第一次对果蝇幼虫滚动时的肌肉活性进行了高时空识别。
研究人员发现,在滚动果蝇幼虫的过程中,身体表面的肌肉群按照身体长轴的方向依次收缩。–舒张运动。当一侧张力反射时,身体弯曲成C形;然后邻近肌肉的接力收缩,促进弯曲方向的动态变化,进而产生持续的滚动扭矩。这种机制类似于“波浪传递”,可以在体内产生腋角驱动扭矩。
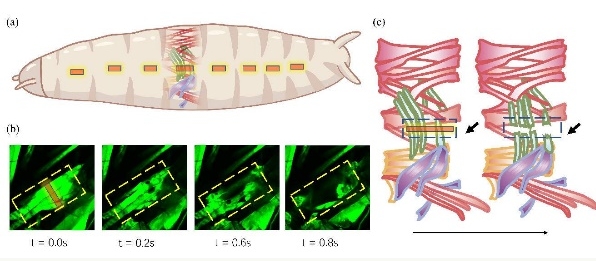
基于此,研究小组建立了一套多尺度的力学模型,将肌肉动力学、流体静力骨变形和触摸摩擦纳入统一框架。模型显示,幼虫体内的液体压力保持了体壁的刚度,使张力反射能量高效转化成型变形。当轴向肌肉按顺序激活时,体壁的不对称应力分布形成滚动扭矩。该模型验证了这种顺序可以在没有外力的情况下产生腋角扭矩,并成功预测了幼虫在平面、倒置表面甚至空气中的滚动行为。理论与实验观测高度一致,通过量化润化环境下滚动速度和摩擦力的稳定平衡。
基于上述生物和机械模型的灵感,团队设计和制造了一个软机器人,只由模拟轴向肌肉组织组成,并通过实时控制这些“肌肉”依次缩放变形,成功展示了机器人自主滚动运动。这一实现不仅验证了机械模型的准确性,也展示了基于内部结构变形驱动的全新滚动机构的工程可行性。
原则上,该研究揭示了依靠内部肌肉序列伸缩产生滚动扭矩的机制,打破了依靠外力的思维定势。并通过软件机器人验证,为新型可变形滚动机构的设计提供了全新的思路,预计未来将在医疗机器人、野外探测、灾区救援等复杂环境下实现快速移动。
赞一个












更有众多热门





