
模仿“琥珀固化”实现微机器人三维磁类精确编程
研发家
|
2025-06-09
44
智能软材料软基材中高矫顽力永磁颗粒磁类的精确编程是促进微机器人在磁场驱动下实现复杂三维变形和多模态运动的关键。目前,由于尺寸效应和工艺的限制,编程策略存在磁类编程精度低、制备效率低、一致性差等问题,不能满足小型化和高通量制备的需要,严重制约了磁控微机器人的集群控制和广泛应用。
针对这一问题,受“琥珀铂固化”现象的启发,西安交通大学物理学院先进功能材料与设备物理团队青年教师韩杰提出了一种新的三维磁类编程策略,无需模板。研究结果是“基于固体应力的微软机器人三维磁类无模板编程”(Proceedings of the National Academy of Sciences,PNAS)在线发表。
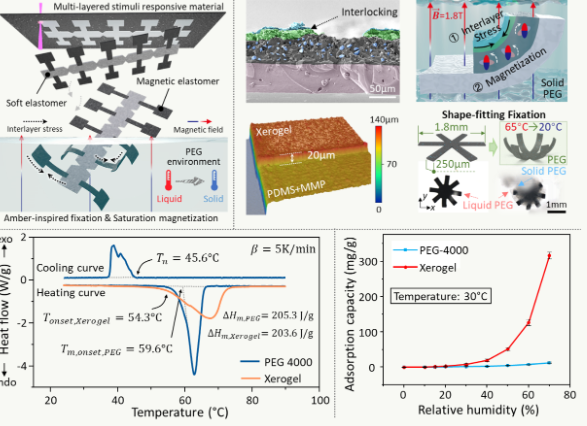
团队建立了干凝胶、激光诱导石墨烯(LIG)由磁弹性体组成的三层异质材料系统利用其三维互联微孔结构,实现超亲水-超疏水页面的平稳连接。干凝胶层在温湿场收缩,诱发固体应力,驱动微结构实现精确的三维变形。然后采用高精度飞秒/皮秒激光加工技术,实现逐级结构和应力编程图案,特点尺寸优于20μm,二级制备效率。最后,在饱和磁场下完成磁化,通过水洗去除PEG和干凝胶层,成功实现了微磁控软件机器人的一致性和批量制备。
该研究不仅提出了一种新的磁编程范式,而且为物理智能微机器人在生物医学、微流量控制和智能集群中的应用奠定了基础。
该研究得到了国家自然科学基金、陕西基础科学(数学、物理)研究所、中央大学基础科研业务费、陕西省科学技术协会青年人才计划等项目的支持。
赞一个
44
版权及免责声明:本网站所有文章除标明原创外,均来自网络。登载本文的目的为传播行业信息,内容仅供参考,如有侵权请联系删除。文章版权归原作者及原出处所有。本网拥有对此声明的最终解释权
更多服务


推荐会议
更多 >>









最新文章
NEW
热点资讯
HOT
学术资源免费领取
加微信领取20G科研大礼包!
更有众多热门
更有众多热门




RDLINK研发家 版权所有 Copyright©2023 All rights reserved

