
小鹏汽车联合北大发新论文:教AI开车学会“抓重点”
研发家
|
2025-12-30
0
就在最近,人工智能领域的国际顶级会议 AAAI 2026 选中了小鹏汽车和北京大学的一篇技术论文。这次小鹏解决了一个行业难题:怎么让车上的电脑跑大模型时,反应速度快得像老司机一样。
给大模型“瘦身”:扔掉废话,留下关键
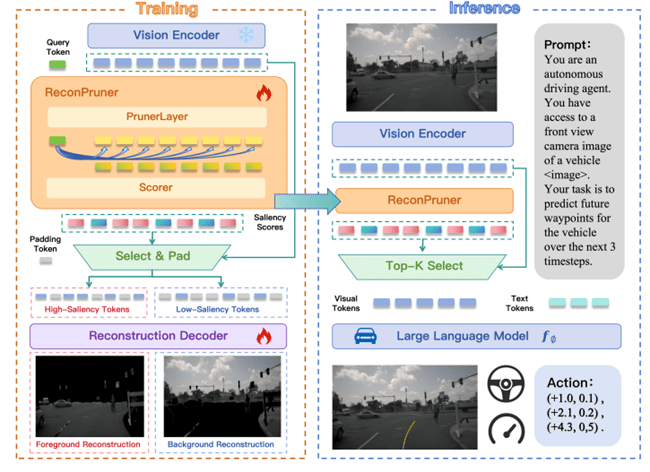
现在的自动驾驶普遍用上了一种大模型技术(专业术语叫 VLA 模型)。它看路的时候,会把车上 6个摄像头 拍到的画面切成成千上万个小碎片,专业上叫 Token(视觉词元)。你可以把它理解为 AI 眼里的“视觉单词”。碎片越多,电脑计算起来就越累,车子的反应可能就会变慢。
为了解决这个问题,小鹏提出了一个叫 FastDriveVLA 的框架,核心技术叫 “剪枝”。简单说,剪枝就是像修剪树枝一样,把画面里没用的部分剪掉:
- 像老司机一样看路:老司机开车时,盯着的是行人、车子、红绿灯和路障(这些叫前景信息),而路边的树木、远处的云朵(这些叫背景)其实不影响开车。
- 专门的“过滤器”:他们做了一个叫 ReconPruner 的小工具。它能自动分清什么是必须要看的重点,把无关紧要的杂讯直接过滤掉。它就像个即插即用的插件,不用重新训练整个大模型就能直接上车使用。
- 用海量图片当教材:为了教 AI 识别重点,团队准备了一个包含 24.1万对图片 的大账本(nuScenes-FG 数据集)。这些图片都有专门的标注,告诉 AI 哪些是真正的障碍物,哪些是不用管的背景。
不仅算得快,开车还更稳了
这套“抓重点”的方法效果非常明显,尤其是在处理速度上有了质的飞跃:
- 大幅减轻电脑负担:如果把没用的碎片减掉四分之三,电脑的计算量(FLOPs,即每秒执行的运算次数)直接减少了接近 7.5倍。
- 缩短“反应时间”:在电脑处理任务时,有一个衡量速度的指标叫 CUDA 延迟。这代表电脑从接收到摄像头画面,到真正算出结果需要等多久。用了这套技术,电脑算出结果前的“准备时间”(预填充)快了 3.7倍,正式“出结果”的时间(解码)快了 1.3倍。
- 水平不降反升:即便剪掉了四分之一的数据,AI 开车的准确性不仅没降,碰撞率和认路指标甚至比以前表现还要好。这是因为 AI 不再被那些乱七八糟的干扰信息带偏了。
赞一个
0
版权及免责声明:本网站所有文章除标明原创外,均来自网络。登载本文的目的为传播行业信息,内容仅供参考,如有侵权请联系删除。文章版权归原作者及原出处所有。本网拥有对此声明的最终解释权
更多服务


推荐会议
更多 >>









最新文章
NEW
热点资讯
HOT
学术资源免费领取
加微信领取20G科研大礼包!
更有众多热门
更有众多热门




RDLINK研发家 版权所有 Copyright©2023 All rights reserved

