
车辆自动驾驶技术再次突破!该技术提升平台跟踪性能
近日,中国科学院Xi安光学研究所空间光学技术研究室研究员赵惠团队在计算机视觉目标跟踪领域取得了重要进展,研究成果发表在中国科学院第一区TOP期刊Knowledged上。-Based Systems(IF = 7.2)。论文第一作者是中国科学院Xi安光学研究所特别研究助理苏银强博士,通信作者是赵惠研究员,中国科学院Xi安光学研究所是第一个完成和通信单位。
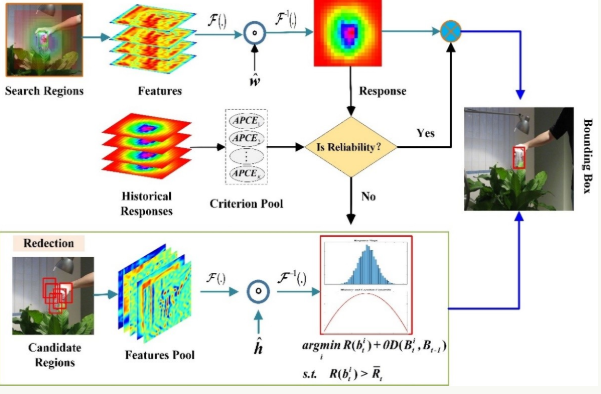
基于相关滤波的判别式(DCF)当跟踪框架在高动态、高密度的杂波环境中跟踪微弱目标时,模型容易漂移甚至跟踪失败。近年来,学术界致力于通过构建鲁棒的目标外观模型,引入辅助策略来抑制跟踪性能下降的问题。然而,目前的研究很难有效抵抗目标周围背景变化的潜在变化。当目标外观剧烈变化或背景信息过多时,滤波器容易受到环境干扰,导致定位可信度明显降低。
对此,研究小组根据之前提出的稀疏上下文感知,对滤波框架进行了相关跟踪。(https://doi.org/10.1016/j.eswa.2024.126225)创新性地构建了双模式藕合优化机制。该机制通过上下文感知协同建模和动态畸变自适应抑制的联合约束策略,构建了具有背景抗扰性和外观稳定性的新型相关滤波器。研究团队在DCF框架中显式集成语境信息,既能感知目标周围背景的变化,又能削弱外部影响的影响;此外,通过约束检验阶段的响应图梯度,可以保持滤波器内部结构的稳定性。此外,该团队还提出了基于历史响应池反馈的高度联动机制,以确保新的目标模板高置信。
同时,研究小组还开发了一种轻量化方法,易于内嵌部署。A Visual Tracking Algorithm Based on Context Constraint and Aberration Suppression with handcrafted feature“通过异构计算转移、多线程并行加速、动态调控等技术手段,有望为遥感卫星监测、无人机自主导航、车辆自动驾驶等实际应用提供强有力的技术保障。在国内嵌入式平台上实现高帧频和强鲁棒的跟踪性能。
研究得到了新一代人工智能国家重大科技项目、国家自然科学基金等项目的支持。
近年来,赵惠团队在复杂场景下不断开展图像质量提升技术的目标识别、跟踪和极端视频研究,发表了80多篇论文和20多项授权专利。
赞一个











更有众多热门





