
中国机器人力量登上国际舞台——灵宝CASBOT在IROS 2025以科研与产品并进,呈现具身智能进展
10月19日至25日,全球机器人与智能系统领域顶级盛会——IROS 2025(IEEE/RSJ International Conference on Intelligent Robots and Systems)在杭州国际博览中心举行。作为机器人学界历史最悠久、影响力最大的国际会议之一,IROS自1988年创办以来,与ICRA并列为机器人领域的“双A会”,长期被视为全球前沿科研与创新成果的风向标。相比偏重产业应用的WAIC、WRC等展会,IROS更注重学术深度与技术原创性,汇聚了来自全球科研机构、高校与前沿企业的研发力量。
在这一国际舞台上,灵宝CASBOT携“双足人形机器人、灵巧手产品及多项学术研究成果”亮相,系统呈现其在具身智能领域的前沿探索与产品工程化进展。灵宝通过展品展示、学术论文分享及主题论坛演讲,全面参与这场关于“人类—机器人前沿”的全球对话。

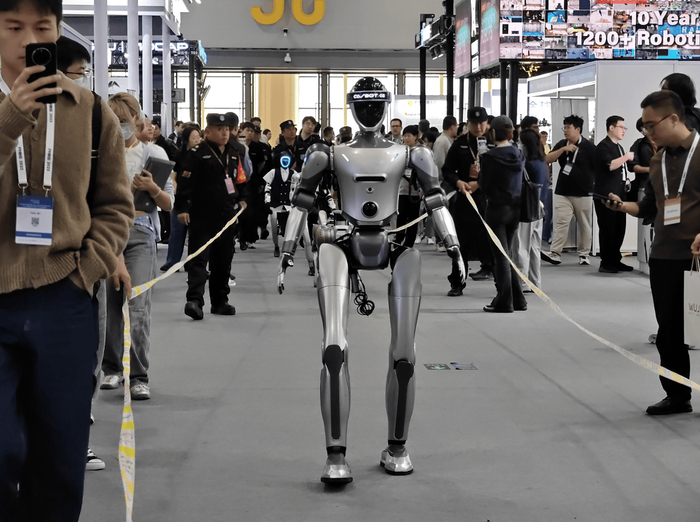
在主会场展区,全尺寸双足人形机器人CASBOT 02与高集成度通用轻量版灵巧手CASBOT Handle-L1成为现场焦点。两款展品从结构设计到感知交互,体现了灵宝在“科研—产品—落地”路径上的系统性成果。CASBOT 02具备37个自由度与多模态感知系统,可实现自然站立与动态平衡控制,展现了结构与决策层面的优化能力;CASBOT Handle-L1采用仿生五指结构与轻量化方案,兼顾高负载与柔性抓取,为具身机器人提供了更丰富的操作延展性。展会期间,CASBOT 02还参与了由大会组织的机器人巡游与集体展示环节,与来自全球的多款机器人同台亮相,展现出中国人形机器人在控制稳定性与交互表现上的进步。

在大会同期的IROS 2025工业论坛上,灵宝CASBOT相关负责人受邀发表主题演讲《General-Purpose Humanoid Robot for Scenario-Based Deployment》,分享灵宝在“科研驱动的产品体系”与“人机共生的长期路径”上的实践。演讲回顾了公司从基础研究到工程化落地的阶段性进展,重点介绍了灵宝在具身智能架构、模型优化与真实场景部署方面的探索,并强调“技术的终点不在实验室,而在现实世界的任务执行中”。

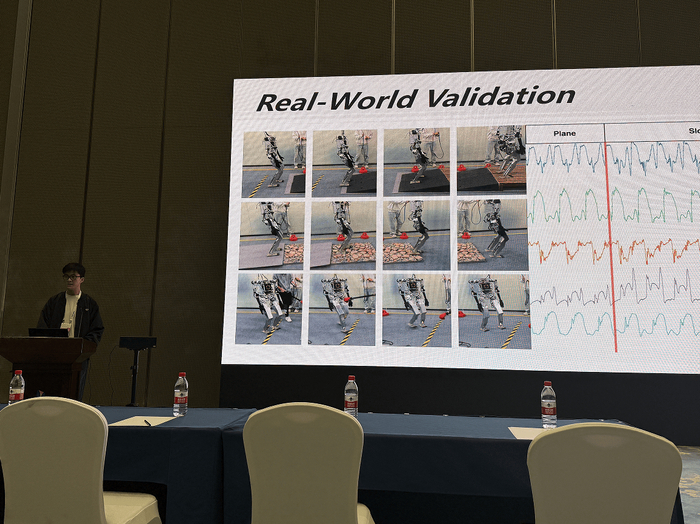
在学术层面,灵宝CASBOT与中国科学院自动化研究所联合提出的研究成果《IDAGC:基于人类意图估计与多模态策略学习的自适应通用人机协作框架》与《TMP:教师运动先验机制提升机器人复杂地形行走能力》均被大会正式录用与展示。前者通过意图识别与多模态策略学习,提升了机器人在人机协作场景下的自适应与安全性;后者通过生成学习与运动先验优化,增强了机器人在复杂地形下的平衡与能效表现。
IROS 2025以“Human-Robot Frontiers(人类—机器人前沿)”为主题,聚焦智能系统与协作控制的国际前沿探索。从展区展示到论文分享,再到论坛交流,灵宝CASBOT以系统化成果回应了国际社会对通用人形机器人落地路径的关注。未来,灵宝CASBOT将继续以具身智能为核心,以工程实践反哺科研为方向,在工业、科研与服务等多领域推动通用机器人走向真实世界。
赞一个











更有众多热门





